https://blog.csdn.net/qq_27590277/article/details/118534238
Felix Flexible Text Editing Through Tagging and Insertion
google继lasertagger之后的又一篇text edit paper
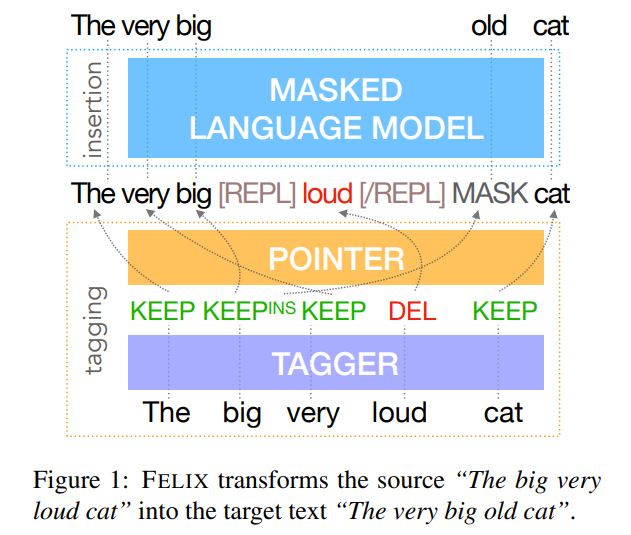
In contrast to conventional sequence-to-sequence (seq2seq) models, FELIX is efficient in low-resource settings and fast at inference time, while being capable of modeling flexible input-output transformations. We achieve this by decomposing the text-editing task into two sub-tasks: tagging to decide on the subset of input tokens and their order in the output text and insertion to in-fill the missing tokens in the output not present in the input.
1 Introduction
In particular, we have designed FELIX with the following requirements in mind: Sample efficiency, Fast inference time, Flexible text editing
2 Model description
FELIX decomposes the conditional probability of generating an output sequence $y$ from an input
$x$ as follows:
2.1 Tagging Model
trained to optimize both the tagging and pointing loss:
Tagging :
tag sequence $\textbf{y}^t$由3种tag组成:$KEEP$,$DELETE$,$INSERT (INS)$
Tags are predicted by applying a single feedforward layer $f$ to the output of the encoder $\textbf{h}^L$ (the source sentence is first encoded using a 12-layer BERT-base model). $\textbf{y}^t_i=argmax(f(\textbf{h}^L_i))$
Pointing:
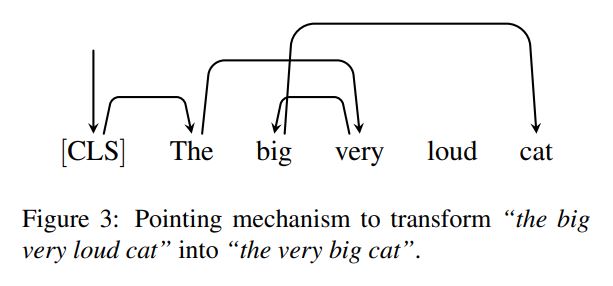
Given a sequence $\textbf{x}$ and the predicted tags $\textbf{y}^t$ , the re-ordering model generates a permutation $\pi$ so that from $\pi$and $\textbf{y}^t$ we can reconstruct the insertion model input $\textbf{y}^m$. Thus we have:
Our implementation is based on a pointer network. The output of this model is a series of predicted pointers (source token → next target token)
The input to the Pointer layer at position $i$:
其中$e(\textbf{y}_i^t)$is the embedding of the predicted tag,$e(\textbf{p}_i)$ is the positional embedding
The pointer network attends over all hidden states, as such:
其中$\textbf{h}_i^{L+1}$ as $Q $, $\textbf{h}_{\pi(i)}^{L+1}$ as $K$
When realizing the pointers, we use a constrained beam search
2.2 Insertion Model
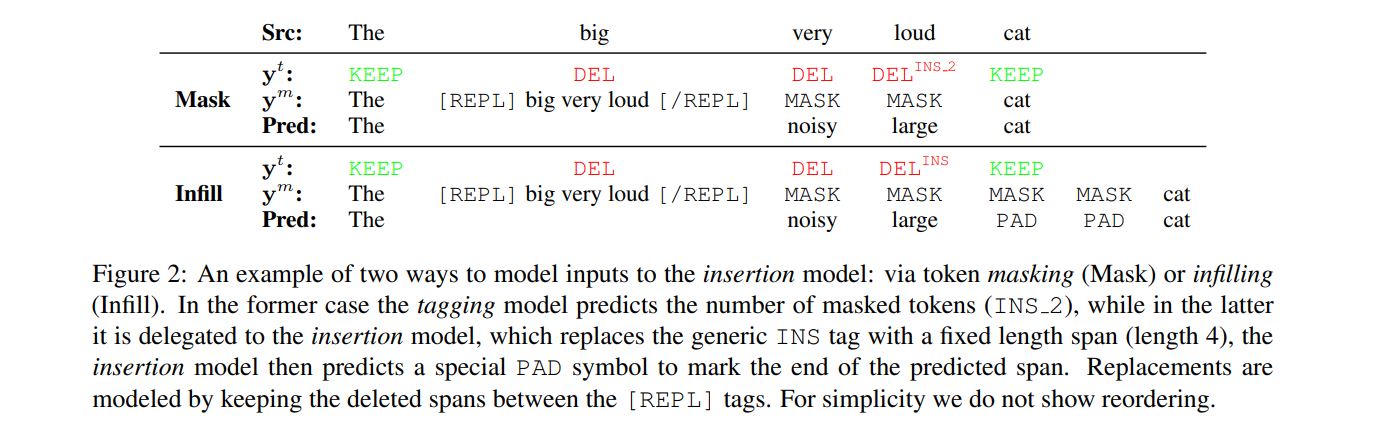
To represent masked token spans we consider two options: masking and infilling. In the former case the tagging model predicts how many tokens need to be inserted by specializing the $INSERT$ tag into $INS_k$, where $k$ translates the span into $ k$ $MASK$ tokens. For the infilling case the tagging model predicts a generic $INS$ tag.
Note that we preserve the deleted span in the input to the insertion model by enclosing it between $[REPL]$ and $[/REPL]$ tags.
our insertion model is also based on a 12-layer BERT-base and we can directly take advantage of the BERT-style pretrained checkpoints.
参考
LASERTAGGER
一. 摘要
对于某一些文本生成任务,输入和输出的文本有很多的重叠部分,如果还是采用encoder-decoder的文本生成模型去从零开始生成,其实是很浪费和没必要的,并且会导致两个问题:1:生成模型的幻觉问题(就是模型胡说八道) ;2:出现叠词(部分片段一致)。
基于上面的考虑,作者提出了lasertagger模型,通过几个常用的操作:keep token、delete token、 add token,给输入序列的每个token打上标签,使得文本生成任务转化为了序列标注任务。
通过这种方式,相较于encoder-decoder模型的优势有如下:1、推理的速度更快 2、在较小的数据集上性能优于seq2seq baseline,在大数据集上和baseline持平(因为输入和输出的文本有很多的重叠部分,对于这种情况,lasertagger的候选词库比较小,因为对于重叠部分的词,词库只需要添加keep,而传统encoder-decoder的候选词库依然很大,因为对于重叠部分的词,词库需要添加对应的词)
二.主要贡献
1、通过输入和输出文本,自动去提取需要add的token
2、通过输入文本,输出文本和tag集,给训练的输入序列打上标签
3、提出了两个版本,$LASERTAGGER_{AR}$( bert+transformer decoder )和$LASERTAGGER_{FF}$( bert+desen+softmax )
三. 整体流程
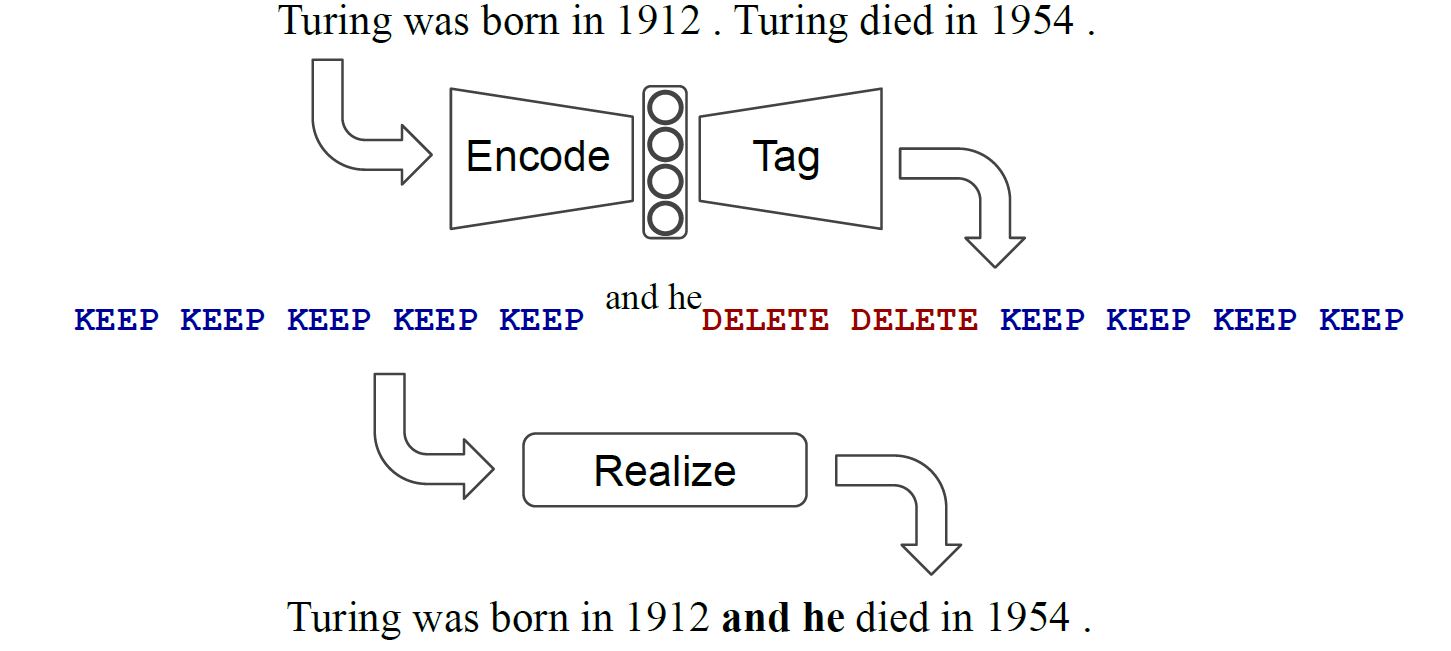
其实就是两个过程,一.将输入文本变编码成特殊标注,二.将标注解码成文本
四. 文本标注
4.1 Tag集构建(也就是label集构建)
一般情况,tag分为两个大类: base tag $B$和 add tag $P$。对于base tag,就是$KEEP$或者$DELETE$当前token;对于add tag,就是要添加一个词到token前面,添加的词来源于词表$V$。实际在工程中,将$B$和$P$结合来表示,即$^{P}B$,总的tag数量大约等于$B$的数量乘以$P$的数量,即$2|V|$。对于某些任务可以引入特定的tag,比如对于句子融合,可以引入$SWAP$,如下图。

4.1.1 词表V的构建
构建目标:
- 最小化词汇表规模;
- 最大化目标词语的比例
限制词汇表的词组数量可以减少相应输出的决策量;最大化目标词语的比例可以防止模型添加无效词。
构建过程:
通过$LCS$算法(longest common sequence,最长公共子序列,注意和最长公共子串不是一回事),找出输入和输出序列的最长公共子序列,输出剩下的序列,就是需要$add$的token,添加到词表$V$,词表中的词基于词频排序,然后选择$l$个常用的。
举个例子:soruce为“12345678”,target为”1264591”
最长公共子序列为[‘1’, ‘2’, ‘4’, ‘5’]
需要$add$的token为 [‘6’, ‘91’]
源码:
1 | def _lcs_table(source, target): |
词表位于文件label_map.txt.log,本人基于自己的数据集,内容如下所示
1 | Idx Frequency Coverage (%) Phrase |
4.1.2 tag集
本人基于自己的数据集,得到的候选tag如下:
1 | KEEP |
4.2 Converting Training Targets into Tags
paper上的伪代码:
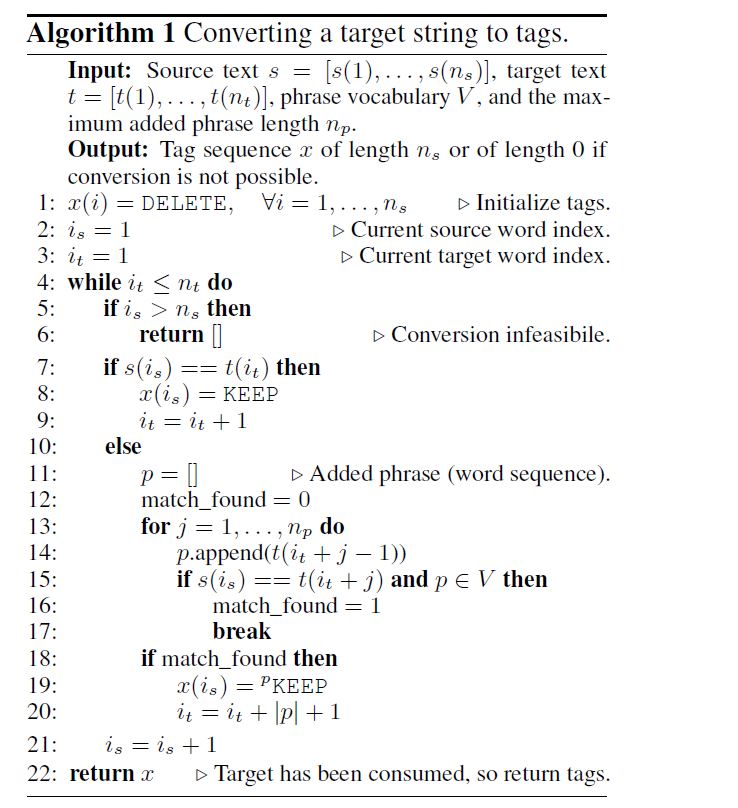
采用贪心策略,核心思想就是遍历$t$,先和$s$匹配,匹配上就$keep$,然后$i_t+j$,得到潜在的$add \ phrase \ p=t(i_t:i_t+j-1) $,然后判断$t(i_t+j)==s(i_s)\ and \ p\in V $
源码:
和伪代码有一点不同,差异在于#####之间。
1 | def _compute_single_tag( |
缺陷:
对于一些情况,无法还原,举个例子:
source:证件有效期截止日期 target:证件日期格式
得不到tag结果
可以补充策略来修复bug
1 | def _compute_tags_fixed_order(self, source_tokens, target_tokens): |
4.3 模型结构
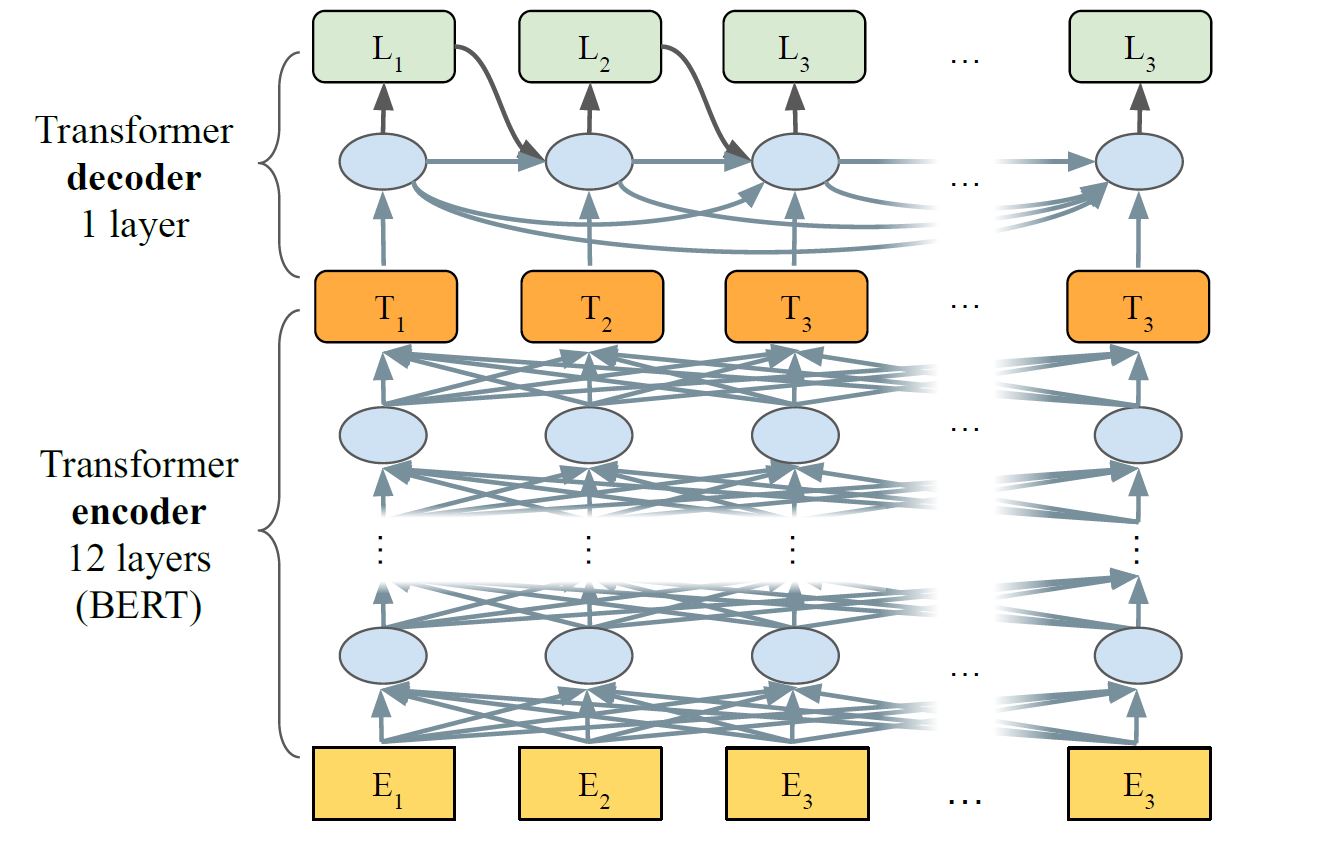
模型主要包含两个部分:1.encoder:generates activation vectors for each element in the input sequence 2.decoder:converts encoder activations into tag labels
4.3.1 encoder
由于$BERT$在sentence encoding tasks上做到state-of-the-art,所以使用$BERT$ 作为encoder部分。作者选择了$BERT_{base}$,包含12个self-attention层
4.3.2 decoder
在$BERT$原文中,对于标注任务采取了非常简单的decoder结构,即采用一层feed-forward作为decoder,把这种组合叫做$LASERTAGGER_{FF}$,这种结构的缺点在于预测的标注词相互独立,没有考虑标注词的关联性。
为了考虑标注词的关联性,decode使用了Transformer decoder,单向连接,记作$LASERTAGGER_{AR}$,这种encoder和decoder的组合的有点像BERT结合GPT的感觉decoder 和encoder在以下方面交流:(i) through a full attention over the sequence of encoder activations (ii) by directly consuming the encoder activation at the current step
4.4 loss
假设句子长度为n,tag数量为m, loss为n个m分类任务的和
五.realize
对于基本的tag,比如$KEEP$,$DELETE$,$ADD$,$realize$就是根据输入和tag直接转换就行;对于特殊的tag,需要一些特定操作,看情况维护规则。
六.评价指标
评价指标,不同任务不同评价指标
1 Sentence Fusion
Exact score :percentage of exactly correctly predicted fusions(类似accuracy)
SARI :average F1 scores of the added, kept, and deleted n-grams
2 Split and Rephrase
SARI
3 Abstractive Summarization
ROUGE-L
4 Grammatical Error Correction (GEC)
precision and recall, F0:5
七.实验结果
baseline: based on Transformer where both the encoder and decoder replicate the $BERT_{base}$ architecture
速度:1.$LASERTAGGER_{AR} $is already 10x faster than comparable-in-accuracy $SEQ2SEQ_{BERT}$ baseline. This difference is due to the former model using a 1-layer decoder (instead of 12 layers) and no encoder-decoder cross attention. 2.$LASERTAGGER_{FF}$ is more than 100x faster
其余结果参考paper
参考
https://arxiv.org/pdf/1909.01187.pdf
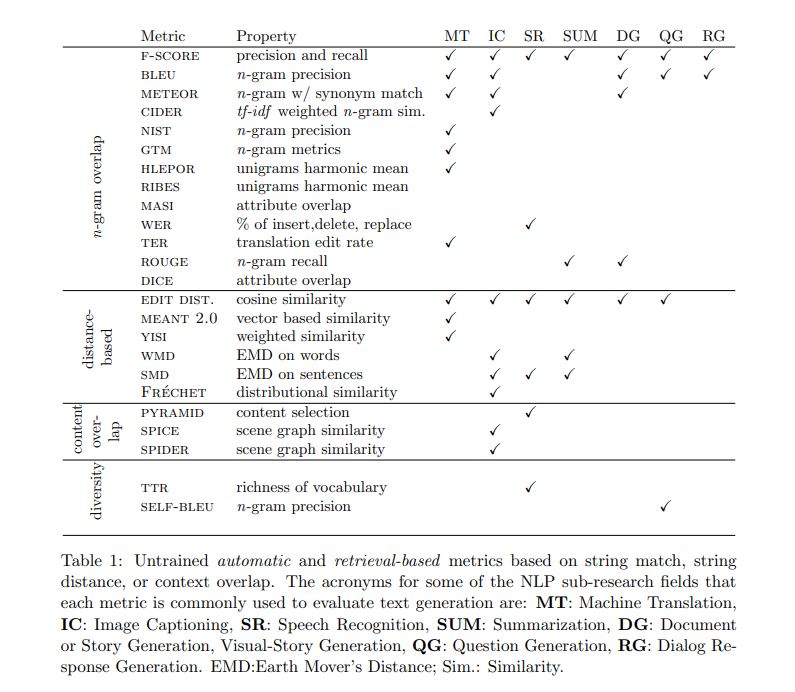
文本生成评价指标
1.BLEU
BLEU,全称为bilingual evaluation understudy,一般用于机器翻译和文本生成的评价,比较候选译文和参考译文里的重合程度,重合程度越高就认为译文质量越高,取值范围为[0,1]。
优点
- 它的易于计算且速度快,特别是与人工翻译模型的输出对比;
- 它应用范围广泛,这可以让你很轻松将模型与相同任务的基准作对比。
缺点
- 它不考虑语义,句子结构
- 不能很好地处理形态丰富的语句(BLEU原文建议大家配备4条翻译参考译文)
- BLEU 指标偏向于较短的翻译结果(brevity penalty 没有想象中那么强)
1.1 完整式子
BLEU完整式子为:
1.2 $BP$
目的:$n-gram$匹配度可能会随着句子长度的变短而变好,比如,只翻译了一个词且对了,那么匹配度很高,为了避免这种评分的偏向性,引入长度惩罚因子
Brevity Penalty为长度惩罚因子,其中$l_c$表示机器翻译的译文长度,$l_s$表示参考答案的有效长度
1.3 $P_n$
人工译文表示为$s_j$,其中$j \in M$,$M$表示共有$M$个参考答案
翻译译文表示$c_i$,其中$i \in E$,$E$表示共有$E$个翻译
$n-gram$表示$n$个单词长度的词组集合,令$k$ 表示第$k$ 个词组,总共$K$个
$h_k(c_i)$表示第$k$个词组在翻译译文$c_i$出现的次数
$h_k(s_{j})$表示第$k$个词组在参考答案$s_{j}$出现的次数
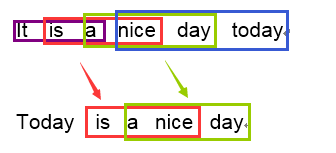
举例如下,例如:
原文:今天天气不错
机器译文:It is a nice day today
人工译文:Today is a nice day
$1-gram$:
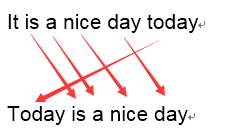
可以看到机器译文一共6个词,有5个词语都命中的了参考译文,$P_1=\frac{5}{6}$
$3-gram$:
机器译文一共可以分为4个$3-gram$的词组,其中有2个可以命中参考译文,那么$P_3=\frac{2}{4}$
1.4 $W_n$
$W_n$表示$P_n$的权重,一般为加权平均,即$W_n=\frac{1}{N}$,其中$N$为$gram$的数量,一般不大于4
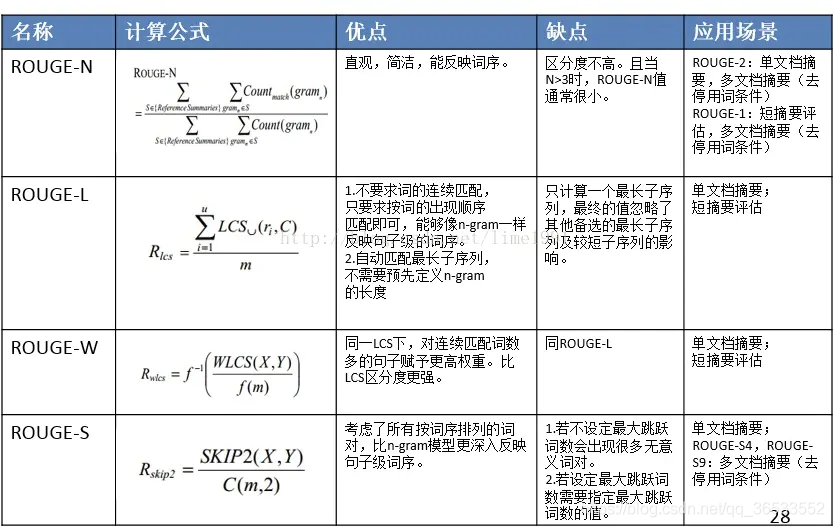
2 ROUGE
Recall-Oriented Understudy for Gisting Evaluation,可以看做是BLEU 的改进版,专注于召回率而非精度。换句话说,它会查看有多少个参考译句中的 n 元词组出现在了输出之中。
ROUGE大致分为四种(常用的是前两种): - ROUGE-N (将BLEU的精确率优化为召回率) - ROUGE-L (将BLEU的n-gram优化为公共子序列) - ROUGE-W (将ROUGE-L的连续匹配给予更高的奖励) - ROUGE-S (允许n-gram出现跳词(skip))
注意:
关于rouge包给出三个结果,而论文只有一个值,比如
1 | [{'rouge-1': {'r': 1.0, 'p': 1.0, 'f': 0.999999995}, 'rouge-2': {'r': 0.0, 'p': 0.0, 'f': 0.0}, 'rouge-l': {'r': 1.0, 'p': 1.0, 'f': 0.999999995}}] |
用“r”,recall就好了
3 NIST
4 METEOR
5 TER
参考文献
https://blog.csdn.net/qq_36533552/article/details/107444391
https://zhuanlan.zhihu.com/p/144182853
https://arxiv.org/pdf/2006.14799.pdf
https://www.cnblogs.com/by-dream/p/7679284.html
https://blog.csdn.net/qq_30232405/article/details/104219396
attention seq2seq
1.结构
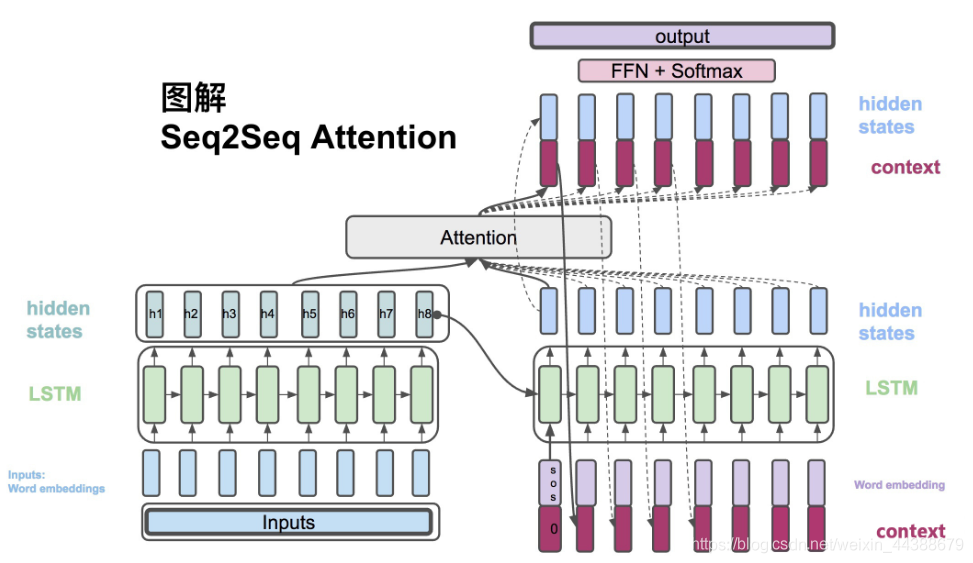
左边为encoder,对输入文本编码,右边为decoder,解码并应用。
整个流程的图解可以参考https://blog.csdn.net/weixin_44388679/article/details/102575223 中的“四、图解Attention Seq2Seq”,非常详细。
2.Teacher Forcing
在训练阶段,如果使用Teacher Forcing策略,那么目标句子单词的word embedding使用真值,否则使用预测结果;至于预测阶段不能使用Teacher Forcing。
3.beam search
beam search本质为介于蛮力与贪心之间的策略。对于贪心,每一级的输出只选择top1的结果作为下一级输入,然后top1的结果只是局部最优,不一定是全局最优,精度可能较低。对于蛮力,每级将全部结果输入下级,假设$L$为词表大小,那么最后一级的数据量为$L^{m}$,$m$为decoder 的cell数量,计算效率太低。对于beam search,每级选择top k作为下级输入,综合了效率和精度。
4 常见问题
0 为什么rnn based seq2seq不需要额外添加位置信息?
天然有位置信息(迭代顺序)
1 为什么rnn based seq2seq输入输出长度可变?
因为rnn based seq2seq是迭代进行的,所以长度可变
2 训练的时候要padding吗?
不用padding
参考
https://zhuanlan.zhihu.com/p/47929039